
去る10月15日に行われたETロボコン2022 東海地区大会の結果です。
表彰チーム
競技部門、モデル審査部門、総合部門で表彰を受けたチームです。
プライマリークラス
競技部門
- 優勝AISAN (愛三工業株式会社 電動システム開発部ソフト開発室・企業)
ベストリザルトタイム:9.5Pt - 準優勝パンダスワン(株式会社日立ソリューションズ・テクノロジー・企業)
ベストリザルトタイム:25Pt - 3位STEMASK2022(愛知県立愛知総合工科高等学校・高校)
ベストリザルトタイム:29.8Pt
モデル審査部門
- ゴールドモデルAISAN (愛三工業株式会社 電動システム開発部ソフト開発室・企業)
モデル評価:A – - シルバーモデルinnovative spirit(株式会社FUJI・企業)
モデル評価:A – - ブロンズモデルさざんか(デンソー工業学園・高校)
モデル評価:B+
総合部門
- 総合優勝AISAN (愛三工業株式会社 電動システム開発部ソフト開発室・企業)
競技:1位, モデル評価:A – - 総合準優勝パンダスワン(株式会社日立ソリューションズ・テクノロジー・企業)
競技:2位, モデル評価:B - 総合3位Verifier (株式会社ベリサーブ 中部事業部・企業)
競技:4位, モデル評価:C+
アドバンストクラス
競技部門
- 優勝D:Drive(株式会社デンソー・企業)
ベストリザルトタイム:-0.2Pt - 準優勝HELIOS(株式会社アドヴィックス・企業)
ベストリザルトタイム:-7.6Pt - 3位チームEYES(株式会社アイズ・ソフトウェア・企業)
ベストリザルトタイム:-7.7Ptモデル審査部門
- ゴールドモデルD:Drive(株式会社デンソー・企業)
モデル評価:A - シルバーモデルHELIOS(株式会社アドヴィックス・企業)
モデル評価:A- - ブロンズモデル該当なし
総合部門
- 総合優勝D:Drive(株式会社デンソー・企業)
競技:1位, モデル評価:A - 総合準優勝HELIOS(株式会社アドヴィックス・企業)
競技:2位, モデル評価:A – - 総合3位チームEYES(株式会社アイズ・ソフトウェア・企業)
競技:3位, モデル評価:C+
特別賞
IPA賞
D:Drive(株式会社デンソー・企業)(受賞理由)
「高品質なモデルを作成し、高品質・高信頼性の制御ソフトウェアを実現した。その結果、モデル評価、競技結果共に1位となった。」チャンピオンシップ大会出場権獲得チーム
チャンピオンシップ大会への出場権を獲得したのは、以下の6チームです。
各チームの皆さんは、東海地区の代表として、チャンピオンシップ大会の優勝を目指してがんばって下さい!プライマリークラス
- AISAN (愛三工業株式会社 電動システム開発部ソフト開発室・企業)
- パンダスワン(株式会社日立ソリューションズ・テクノロジー・企業)
- Verifier (株式会社ベリサーブ 中部事業部・企業)
- STEMASK2022(愛知県立愛知総合工科高等学校・高校)
アドバンストクラス
- D:Drive(株式会社デンソー・企業)
- HELIOS(株式会社アドヴィックス・企業)
結果一覧
プライマリークラス
チームID チーム名 所属 参加資格 モデル評価 競技順位 7 さぼてん デンソー工業学園 高校 B 5 8 さざんか デンソー工業学園 高校 B+ 14 24 Speegle 静岡大学情報学部情報科学科 大学 C 5 25 DrunkDuck 株式会社コア 中部カンパニー 企業 D 5 26 花形 静岡産業技術専門学校 みらい情報科 専門学校 C- 14 30 STEMASK2022 愛知県立愛知総合工科高等学校 高校 C- 3 41 HAL名古屋301 HAL名古屋 専門学校 C 5 42 HAL名古屋401 HAL名古屋 専門学校 C+ 5 49 HAL名古屋402 HAL名古屋 専門学校 C+ 5 64 はまぽり 浜松職業能力開発短期大学校 短期大学 D+ 17 79 AISAN 愛三工業株式会社 電動システム開発部ソフト開発室 企業 A- 1 83 チームエイアイティ 愛知工業大学 大学 C 14 99 パンダスワン 株式会社日立ソリューションズ・テクノロジー B 企業 2 115 Verifier 株式会社ベリサーブ 中部事業部 企業 C+ 4 136 innovative spirit 株式会社FUJI 企業 A- 5 138 THANK FUJI~革新の翼~ 株式会社FUJI 企業 B 13 145 スマートエッジ エイイー 株式会社シー・エス・イースマートエッジ事業部 企業 C 5 分布図
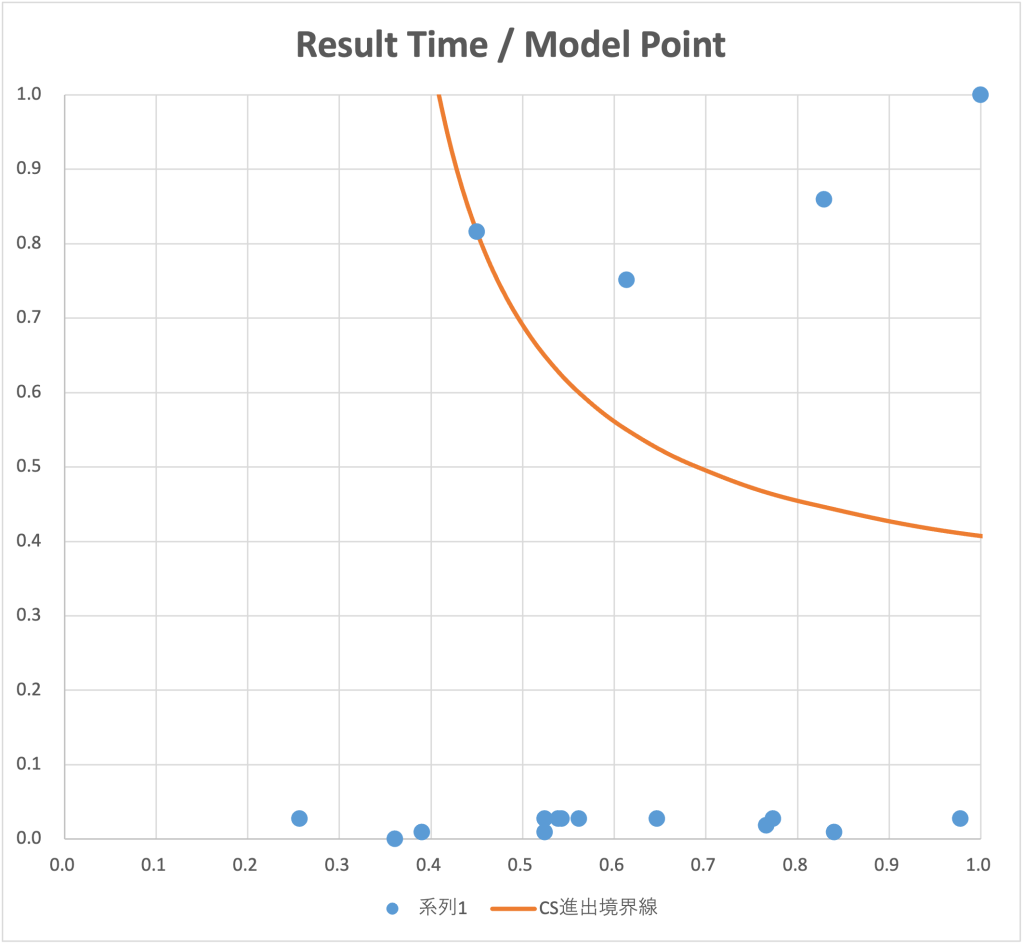
プライマリークラスの分布図 アドバンストクラス
チームID チーム名 所属 参加資格 モデル評価 競技順位 13 FUNCUSHIONZ 株式会社コーワメックス 企業 C- 4 16 HELIOS 株式会社アドヴィックス 企業 A- 2 38 ジョリーデベロッパーズ 個人 D 5 88 チームEYES 株式会社アイズ・ソフトウェア 企業 C+ 3 124 D:Drive 株式会社デンソー 企業 A 1 分布図
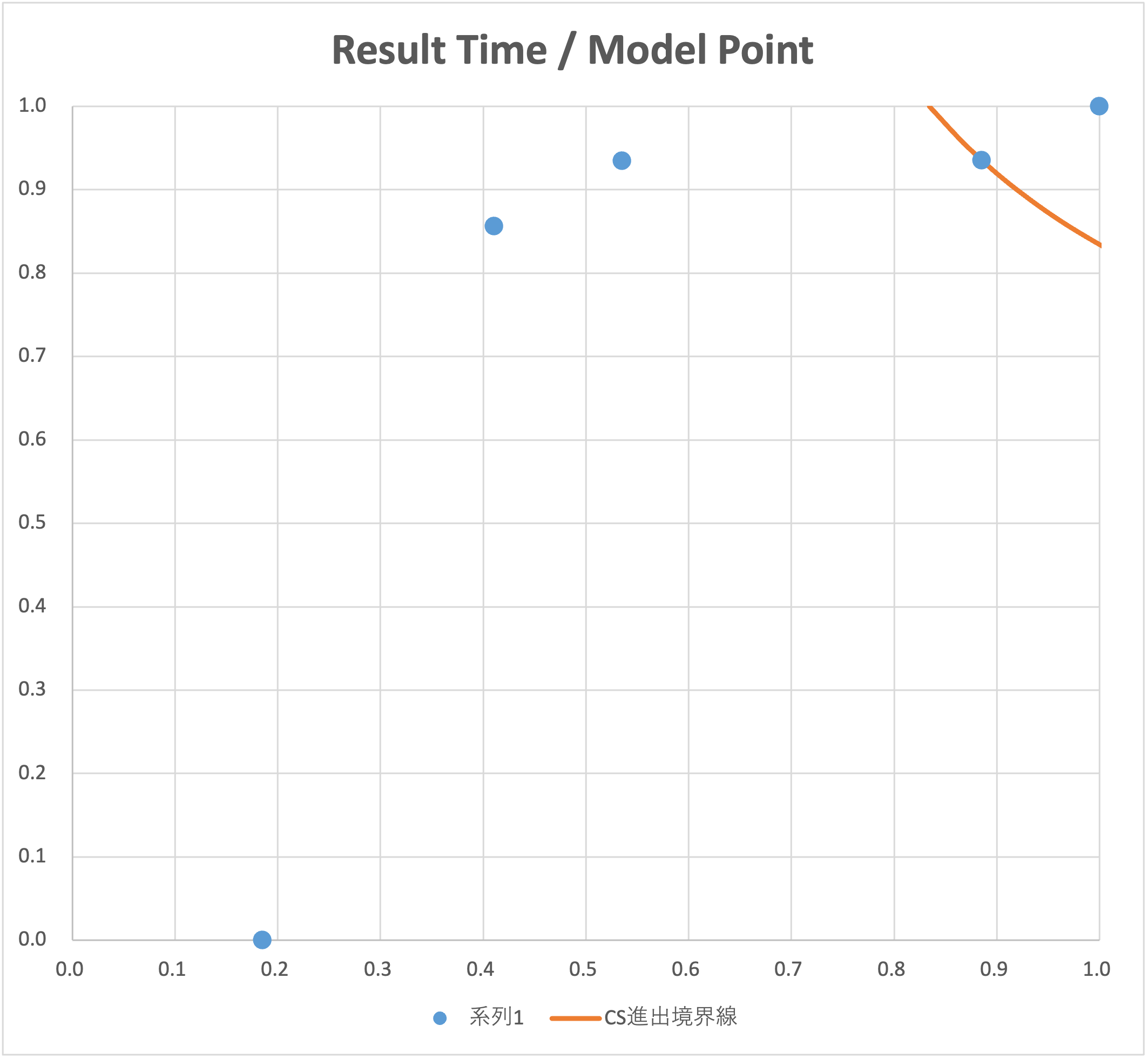
アドバンストクラスの分布図 大会の動画
当日の競技と表彰式の動画を公開します。
- YouTubeYouTube でお気に入りの動画や音楽を楽しみ、オリジナルのコンテンツをアップロードして友だちや家族、世界中の人たちと共有しましょう。youtu.be


